

大量参考江协科技视频,十分感谢给出的教程
计算公式
CK_CNT=CK_PSC/(PSC+1)
CK_CNT_OV=CK_CNT/(ARR+1)
CK_CNT_OV=CK_PSC/(PSC+1)/(ARR+1)
# CK_PSC:stm32频率 72Mhz
# PSC:TIM_Prescaler值 max:65535 预分频器
# ARR:TIM_Period值 max:65535 自动重装器
# CK_CNT:计数计数频率
# CK_CNT_OV:频率
假设,计时1s,那么可先想到ARR=72,PSC=1000000,但是这样会超出max,所以,可以选用ARR=7200,PSC=10000的方案,但是不是唯一的,只要计算出CK_CNT_OV=1且设置的值不会超出即可,高的计数频率便设置高的计数,低的计数频率就设置低的计数
相关函数介绍
void TIM_DeInit(TIM_TypeDef* TIMx);//恢复默认配置
void TIM_TimeBaseInit(TIM_TypeDef* TIMx, TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);//时基单元初始化
void TIM_TimeBaseStructInit(TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);//结构体变量赋值初值
void TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState);//计数器使能
void TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState);//使能中断
void TIM_InternalClockConfig(TIM_TypeDef* TIMx);//使用内部时钟
void TIM_ITRxExternalClockConfig(TIM_TypeDef* TIMx, uint16_t TIM_InputTriggerSource);//使用itx其他定时器时钟
void TIM_TIxExternalClockConfig(TIM_TypeDef* TIMx, uint16_t TIM_TIxExternalCLKSource,
uint16_t TIM_ICPolarity, uint16_t ICFilter);//选择tix捕获通道时钟
void TIM_ETRClockMode1Config(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler, uint16_t TIM_ExtTRGPolarity,
uint16_t ExtTRGFilter);//etr通过外部时钟模式1输入的时钟
void TIM_ETRClockMode2Config(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler,
uint16_t TIM_ExtTRGPolarity, uint16_t ExtTRGFilter);//etr通过外部时钟模式2输入的时钟
void TIM_ETRConfig(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler, uint16_t TIM_ExtTRGPolarity,
uint16_t ExtTRGFilter);//配置etr引脚的预分频器、极性、滤波器等参数
void TIM_PrescalerConfig(TIM_TypeDef* TIMx, uint16_t Prescaler, uint16_t TIM_PSCReloadMode);//修改预分频值
void TIM_CounterModeConfig(TIM_TypeDef* TIMx, uint16_t TIM_CounterMode);//改变计数器的计数模式
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);//知道自动重装器预装功能配置
void TIM_SetCounter(TIM_TypeDef* TIMx, uint16_t Counter);//向指定计数器写入值
TIM_SetAutoreload(TIM_TypeDef* TIMx, uint16_t Autoreload);//给自动重装器写一个值
uint16_t TIM_GetCounter(TIM_TypeDef* TIMx);//获取当前计数器的值
uint16_t TIM_GetPrescaler(TIM_TypeDef* TIMx);//获取当前预分频器的值
/*获取/清除标志位*/
FlagStatus TIM_GetFlagStatus(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
void TIM_ClearFlag(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
ITStatus TIM_GetITStatus(TIM_TypeDef* TIMx, uint16_t TIM_IT);
void TIM_ClearITPendingBit(TIM_TypeDef* TIMx, uint16_t TIM_IT);
配置使用内部时钟
void Timer_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//启用定时器2的时钟
TIM_InternalClockConfig(TIM2);//设置时钟为内部时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;//初始化定时器结构体
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//设置分频系数
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//设置计数模式
TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1;//设置自动重装值
TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1;//设置预分频器的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//设置重复寄存器值,仅高级寄存器有效
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);//初始化定时器
TIM_ClearFlag(TIM2, TIM_FLAG_Update);//防止初始化时进入中断
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);//启用定时器
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置NVIC智能高端分组
NVIC_InitTypeDef NVIC_InitStructure;//初始化NVIC结构体
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;//设置中断触发通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//启用
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;//设置抢占优先级值
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//设置响应优先级的值
NVIC_Init(&NVIC_InitStructure);//初始化 NVIC
TIM_Cmd(TIM2, ENABLE);//启用TIM2定时器
}
void TIM2_IRQHandler(void)//定时中断函数
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
假设使用TIM2
配置时钟
TIM2属于APB1总线的外设,所以初始化APB1
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
选择时基单元时钟
这里先择使用内部时钟,其实使用内部时钟也可以不写,默认就是使用内部时钟
TIM_InternalClockConfig(TIM2);
配置时基单元
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
其中结构体
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;·
TIM_ClockDivision:指定时钟分频
/** @defgroup TIM_Clock_Division_CKD * @{ */ #define TIM_CKD_DIV1 ((uint16_t)0x0000)//不分频 #define TIM_CKD_DIV2 ((uint16_t)0x0100)//2分频 #define TIM_CKD_DIV4 ((uint16_t)0x0200)//4分频 #define IS_TIM_CKD_DIV(DIV) (((DIV) == TIM_CKD_DIV1) || \ ((DIV) == TIM_CKD_DIV2) || \ ((DIV) == TIM_CKD_DIV4))TIM_CounterMode:计数模式
/** @defgroup TIM_Counter_Mode * @{ */ #define TIM_CounterMode_Up ((uint16_t)0x0000)//向上计数 #define TIM_CounterMode_Down ((uint16_t)0x0010)//向下计数 #define TIM_CounterMode_CenterAligned1 ((uint16_t)0x0020)//三种中央对齐 #define TIM_CounterMode_CenterAligned2 ((uint16_t)0x0040) #define TIM_CounterMode_CenterAligned3 ((uint16_t)0x0060) #define IS_TIM_COUNTER_MODE(MODE) (((MODE) == TIM_CounterMode_Up) || \ ((MODE) == TIM_CounterMode_Down) || \ ((MODE) == TIM_CounterMode_CenterAligned1) || \ ((MODE) == TIM_CounterMode_CenterAligned2) || \ ((MODE) == TIM_CounterMode_CenterAligned3))TIM_Period:周期,ARR自动重装器的值
TIM_Prescaler:预分频器的值
上两式需要以下公式
CK_CNT_OV=CK_CNT/(ARR+1)=CK_PSC/(PSC+1)/(ARR+1)假设定时1s,也就是1hz,1=75m/10000/7200,也就是PSC=10000-1,ARR=7200-1,需要注意的是这不是唯一解,但是需要注意的是值需要0~65535之间
TIM_RepetitionCounter:重复计数器的值,此为高级计数器才有,TIM2为普通计数器,没有此项
使能中断
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
/**
* @brief Clears the TIMx's pending flags.
* @param TIMx: where x can be 1 to 17 to select the TIM peripheral.
* @param TIM_FLAG: specifies the flag bit to clear.
* This parameter can be any combination of the following values:
* @arg TIM_FLAG_Update: TIM update Flag
* @arg TIM_FLAG_CC1: TIM Capture Compare 1 Flag
* @arg TIM_FLAG_CC2: TIM Capture Compare 2 Flag
* @arg TIM_FLAG_CC3: TIM Capture Compare 3 Flag
* @arg TIM_FLAG_CC4: TIM Capture Compare 4 Flag
* @arg TIM_FLAG_COM: TIM Commutation Flag
* @arg TIM_FLAG_Trigger: TIM Trigger Flag
* @arg TIM_FLAG_Break: TIM Break Flag
* @arg TIM_FLAG_CC1OF: TIM Capture Compare 1 overcapture Flag
* @arg TIM_FLAG_CC2OF: TIM Capture Compare 2 overcapture Flag
* @arg TIM_FLAG_CC3OF: TIM Capture Compare 3 overcapture Flag
* @arg TIM_FLAG_CC4OF: TIM Capture Compare 4 overcapture Flag
* @note
* - TIM6 and TIM7 can have only one update flag.
* - TIM9, TIM12 and TIM15 can have only TIM_FLAG_Update, TIM_FLAG_CC1,
* TIM_FLAG_CC2 or TIM_FLAG_Trigger.
* - TIM10, TIM11, TIM13, TIM14, TIM16 and TIM17 can have TIM_FLAG_Update or TIM_FLAG_CC1.
* - TIM_FLAG_Break is used only with TIM1, TIM8 and TIM15.
* - TIM_FLAG_COM is used only with TIM1, TIM8, TIM15, TIM16 and TIM17.
* @retval None
*/
void TIM_ClearFlag(TIM_TypeDef* TIMx, uint16_t TIM_FLAG)
参数1、选择定时器
参数2、更新中断
参数3、是否启用
配置NVIC
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断分组
NVIC_InitTypeDef NVIC_InitStructure;//创建结构体
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;//中断通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//启用
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;//抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//响应优先级
NVIC_Init(&NVIC_InitStructure);//启动
启用定时器
TIM_Cmd(TIM2, ENABLE);
书写中断函数
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)//确认是否是TIM2中断
{
/*code*/
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);//清除中断标志位
}
}
总结
第一步,配置RCC定时器的时钟
第二步,配置时基单元为内部时钟(可以忽略)
第三步,配置时基单元,这一步最为重要
第四步,开启中断
第五步,配置NVIC以配置中断通道与中断的优先级
第六步,启动定时器
第七步,中断函数的具体实现
添加使用外部时钟
假设将外部时钟在PA0口
使用外部时钟
将**TIM_InternalClockConfig(TIM2);**替换为
即配置为外部时钟
TIM_ETRClockMode2Config(TIM2, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0x0F);
/**
* @brief Configures the External clock Mode2
* @param TIMx: where x can be 1, 2, 3, 4, 5 or 8 to select the TIM peripheral.
* @param TIM_ExtTRGPrescaler: The external Trigger Prescaler.
* This parameter can be one of the following values:
* @arg TIM_ExtTRGPSC_OFF: ETRP Prescaler OFF.
* @arg TIM_ExtTRGPSC_DIV2: ETRP frequency divided by 2.
* @arg TIM_ExtTRGPSC_DIV4: ETRP frequency divided by 4.
* @arg TIM_ExtTRGPSC_DIV8: ETRP frequency divided by 8.
* @param TIM_ExtTRGPolarity: The external Trigger Polarity.
* This parameter can be one of the following values:
* @arg TIM_ExtTRGPolarity_Inverted: active low or falling edge active.
* @arg TIM_ExtTRGPolarity_NonInverted: active high or rising edge active.
* @param ExtTRGFilter: External Trigger Filter.
* This parameter must be a value between 0x00 and 0x0F
* @retval None
*/
void TIM_ETRClockMode2Config(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler,
uint16_t TIM_ExtTRGPolarity, uint16_t ExtTRGFilter)
参数1、配置时钟TIMx
参数2、分频值
参数3、外部触发的极性,TIM_ExtTRGPolarity_Inverted下降沿或低电平有效,TIM_ExtTRGPolarity_NonInverted上升沿或者高电平有效
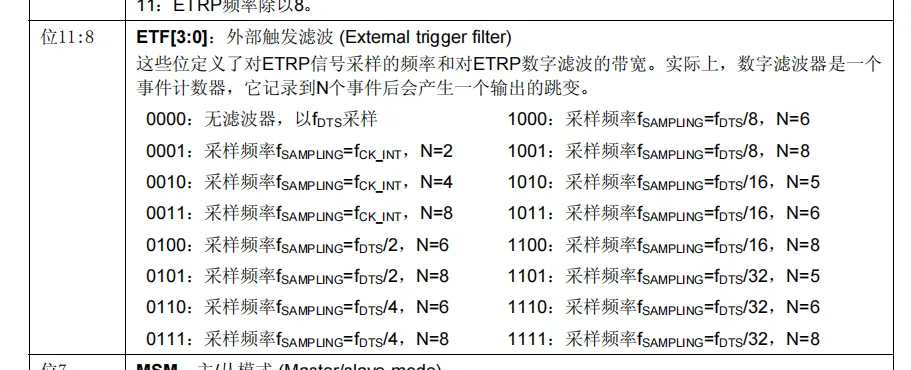
参数4、外部触发滤波器0x00 ~ 0x0f之间的值以采样频率f采样N个点
初始化时钟与GPIO
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//当小电平时,推荐使用浮空输入,如果电平够大,可以使用上拉输入,好处是防止跳动
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
改动后代码
void Timer_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_ETRClockMode2Config(TIM2, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0xff);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 10 - 1;
TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM2, ENABLE);
}
总结
第一步,配置RCC定时器的时钟,相较于内部时钟需要额外配置GPIO的时钟
第二步,配置时基单元为外部时钟,设置时钟号、分频值、触发极性、滤波器
之后的操作与配置使用内部时钟无异