

【STM32入门教程-2023持续更新中】https://www.bilibili.com/video/BV1th411z7sn?p=16&vd_source=a72069186a610509925b0932bb49f8cc
pwm的三个参数
频率、占空比、幅值
输出比较模式

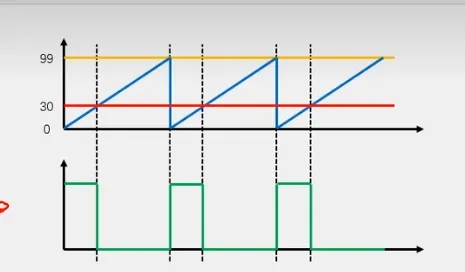
上图 ARR=99 CCR=29
一般根据分辨率先确定ARR,之后设置PSC设置频率,使用CCR设置占空比
输出比较模块配置函数
/*四个比较单元、四个比较模块配置函数、*/
void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC2Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC3Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC4Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
/*为结构体赋值初值*/
void TIM_OCStructInit(TIM_OCInitTypeDef* TIM_OCInitStruct);
/*配置CCR寄存器预装功能*/
void TIM_OC1PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC2PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC3PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC4PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
/*修改输出使能参数*/
void TIM_OC4PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_CCxCmd(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_CCx);
/*设置输出比较模式*/
void TIM_SelectOCxM(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_OCMode);
/*更改CCR寄存器值*/
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1);
void TIM_SetCompare2(TIM_TypeDef* TIMx, uint16_t Compare2);
void TIM_SetCompare3(TIM_TypeDef* TIMx, uint16_t Compare3);
void TIM_SetCompare4(TIM_TypeDef* TIMx, uint16_t Compare4);
/*仅高级定时器使用*/
void TIM_CtrlPWMOutputs(TIM_TypeDef* TIMx, FunctionalState NewState);
/*配置强制输出模式*/
void TIM_ForcedOC1Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC2Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC3Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC4Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
/*配置快速使能*/
void TIM_OC1FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC2FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC3FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC4FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
/*外部事件时清除REF信号*/
void TIM_ClearOC1Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
void TIM_ClearOC2Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
void TIM_ClearOC3Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
void TIM_ClearOC4Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
/*设置输出比较极性*/
void TIM_OC1PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC1NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);
void TIM_OC2PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC2NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);
void TIM_OC3PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC3NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);
void TIM_OC4PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
配置PWM波输出
复制STM32 TIM定时器配置使用内部时钟的代码,作出以下修改
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
/*
TIM_ClearFlag(TIM2, TIM_FLAG_Update);//防止初始化时进入中断
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
*/
TIM_Cmd(TIM2, ENABLE);
配置OC
/**
* @brief Initializes the TIMx Channel1 according to the specified
* parameters in the TIM_OCInitStruct.
* @param TIMx: where x can be 1 to 17 except 6 and 7 to select the TIM peripheral.
* @param TIM_OCInitStruct: pointer to a TIM_OCInitTypeDef structure
* that contains the configuration information for the specified TIM peripheral.
* @retval None
*/
void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct)
参数1、TIMx
参数2、TIM_OCInitTypeDef结构体
结构体内容
/**
* @brief TIM Output Compare Init structure definition
*/
typedef struct
{
uint16_t TIM_OCMode; /*!< Specifies the TIM mode.
This parameter can be a value of @ref TIM_Output_Compare_and_PWM_modes */
uint16_t TIM_OutputState; /*!< Specifies the TIM Output Compare state.
This parameter can be a value of @ref TIM_Output_Compare_state */
uint16_t TIM_OutputNState; /*!< Specifies the TIM complementary Output Compare state.
This parameter can be a value of @ref TIM_Output_Compare_N_state
@note This parameter is valid only for TIM1 and TIM8. */
uint16_t TIM_Pulse; /*!< Specifies the pulse value to be loaded into the Capture Compare Register.
This parameter can be a number between 0x0000 and 0xFFFF */
uint16_t TIM_OCPolarity; /*!< Specifies the output polarity.
This parameter can be a value of @ref TIM_Output_Compare_Polarity */
uint16_t TIM_OCNPolarity; /*!< Specifies the complementary output polarity.
This parameter can be a value of @ref TIM_Output_Compare_N_Polarity
@note This parameter is valid only for TIM1 and TIM8. */
uint16_t TIM_OCIdleState; /*!< Specifies the TIM Output Compare pin state during Idle state.
This parameter can be a value of @ref TIM_Output_Compare_Idle_State
@note This parameter is valid only for TIM1 and TIM8. */
uint16_t TIM_OCNIdleState; /*!< Specifies the TIM Output Compare pin state during Idle state.
This parameter can be a value of @ref TIM_Output_Compare_N_Idle_State
@note This parameter is valid only for TIM1 and TIM8. */
} TIM_OCInitTypeDef;
首先TIM_OCStructInit(&TIM_OCInitStructure);初始化结构体初始值
TIM_OCMode:设置输出比较的模式
/** @defgroup TIM_Output_Compare_and_PWM_modes * @{ */ #define TIM_OCMode_Timing ((uint16_t)0x0000)//冻结模式 #define TIM_OCMode_Active ((uint16_t)0x0010)//相等时置有效电平 #define TIM_OCMode_Inactive ((uint16_t)0x0020)//相等时置无效电平 #define TIM_OCMode_Toggle ((uint16_t)0x0030)//相等时反转 #define TIM_OCMode_PWM1 ((uint16_t)0x0060)//PWM模式1 #define TIM_OCMode_PWM2 ((uint16_t)0x0070)//PWM模式2 #define IS_TIM_OC_MODE(MODE) (((MODE) == TIM_OCMode_Timing) || \ ((MODE) == TIM_OCMode_Active) || \ ((MODE) == TIM_OCMode_Inactive) || \ ((MODE) == TIM_OCMode_Toggle)|| \ ((MODE) == TIM_OCMode_PWM1) || \ ((MODE) == TIM_OCMode_PWM2)) #define IS_TIM_OCM(MODE) (((MODE) == TIM_OCMode_Timing) || \ ((MODE) == TIM_OCMode_Active) || \ ((MODE) == TIM_OCMode_Inactive) || \ ((MODE) == TIM_OCMode_Toggle)|| \ ((MODE) == TIM_OCMode_PWM1) || \ ((MODE) == TIM_OCMode_PWM2) || \ ((MODE) == TIM_ForcedAction_Active) || \ ((MODE) == TIM_ForcedAction_InActive))比如使用PWM1则 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCPolarity:设置输出比较的极性
/** @defgroup TIM_Output_Compare_Polarity * @{ */ #define TIM_OCPolarity_High ((uint16_t)0x0000)//REF电平输出 #define TIM_OCPolarity_Low ((uint16_t)0x0002)//REF电平取反 #define IS_TIM_OC_POLARITY(POLARITY) (((POLARITY) == TIM_OCPolarity_High) || \ ((POLARITY) == TIM_OCPolarity_Low))例如 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OutputState:设置输出使能
/** @defgroup TIM_Output_Compare_state * @{ */ #define TIM_OutputState_Disable ((uint16_t)0x0000)//启用 #define TIM_OutputState_Enable ((uint16_t)0x0001)//禁用 #define IS_TIM_OUTPUT_STATE(STATE) (((STATE) == TIM_OutputState_Disable) || \ ((STATE) == TIM_OutputState_Enable))TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_Pulse:设置CCR寄存器值
uint16_t TIM_Pulse; /*!< Specifies the pulse value to be loaded into the Capture Compare Register. This parameter can be a number between 0x0000 and 0xFFFF */值为CCR的值,值的范围为 0x0000 ~ 0xFFFF
配置GPIO口输出PWM
查表的使用PA0输出PWM
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);、
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
总览
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR定时器的计数范围
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSC预分频器的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; //CCR 控制占空比
TIM_OC1Init(TIM2, &TIM_OCInitStructure);
TIM_Cmd(TIM2, ENABLE);
如何修改其占空比
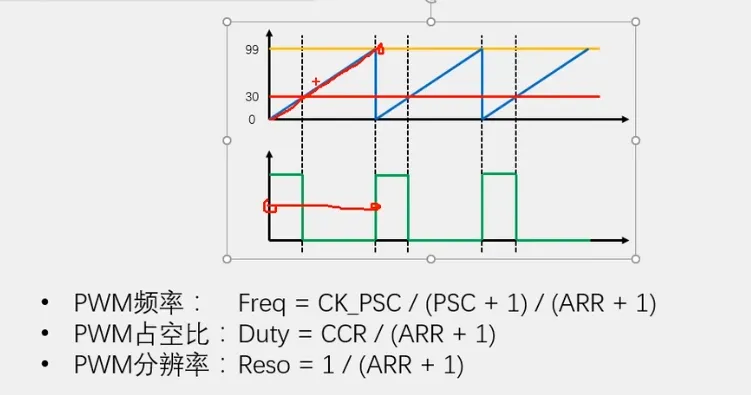
占空比由ARR和CCR决定
Duty=CCR/(ARR+1)
所以修改CCR可以修改占空比
使用TIM_SetCompare1( )可以修改占空比,删除TIM_OCInitStructure.TIM_Pulse = 0;,使用函数控制占空比
/**
* @brief Sets the TIMx Capture Compare1 Register value
* @param TIMx: where x can be 1 to 17 except 6 and 7 to select the TIM peripheral.
* @param Compare1: specifies the Capture Compare1 register new value.
* @retval None
*/
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1)
参数1、TIMx
参数2、CRR值
例如
TIM_SetCompare1(TIM2, 100);//修改通道1的CCR值
如何修改频率
/**
* @brief Configures the TIMx Prescaler.
* @param TIMx: where x can be 1 to 17 to select the TIM peripheral.
* @param Prescaler: specifies the Prescaler Register value
* @param TIM_PSCReloadMode: specifies the TIM Prescaler Reload mode
* This parameter can be one of the following values:
* @arg TIM_PSCReloadMode_Update: The Prescaler is loaded at the update event.
* @arg TIM_PSCReloadMode_Immediate: The Prescaler is loaded immediately.
* @retval None
*/
void TIM_PrescalerConfig(TIM_TypeDef* TIMx, uint16_t Prescaler, uint16_t TIM_PSCReloadMode)
参数1、TIMx
参数2、Prescaler为PSC的值
参数3、TIM_PSCReloadMode_Update在更新事件后加载,TIM_PSCReloadMode_Immediate为立即加载
引脚占用,如何实现引脚重映射?
此时需要AFIO的功能
1、开启AFIO的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
2、引脚重映射配置
8.3 表43
/**
* @brief Changes the mapping of the specified pin.
* @param GPIO_Remap: selects the pin to remap.
* This parameter can be one of the following values:
* @arg GPIO_Remap_SPI1 : SPI1 Alternate Function mapping
* @arg GPIO_Remap_I2C1 : I2C1 Alternate Function mapping
* @arg GPIO_Remap_USART1 : USART1 Alternate Function mapping
* @arg GPIO_Remap_USART2 : USART2 Alternate Function mapping
* @arg GPIO_PartialRemap_USART3 : USART3 Partial Alternate Function mapping
* @arg GPIO_FullRemap_USART3 : USART3 Full Alternate Function mapping
* @arg GPIO_PartialRemap_TIM1 : TIM1 Partial Alternate Function mapping
* @arg GPIO_FullRemap_TIM1 : TIM1 Full Alternate Function mapping
* @arg GPIO_PartialRemap1_TIM2 : TIM2 Partial1 Alternate Function mapping
* @arg GPIO_PartialRemap2_TIM2 : TIM2 Partial2 Alternate Function mapping
* @arg GPIO_FullRemap_TIM2 : TIM2 Full Alternate Function mapping
* @arg GPIO_PartialRemap_TIM3 : TIM3 Partial Alternate Function mapping
* @arg GPIO_FullRemap_TIM3 : TIM3 Full Alternate Function mapping
* @arg GPIO_Remap_TIM4 : TIM4 Alternate Function mapping
* @arg GPIO_Remap1_CAN1 : CAN1 Alternate Function mapping
* @arg GPIO_Remap2_CAN1 : CAN1 Alternate Function mapping
* @arg GPIO_Remap_PD01 : PD01 Alternate Function mapping
* @arg GPIO_Remap_TIM5CH4_LSI : LSI connected to TIM5 Channel4 input capture for calibration
* @arg GPIO_Remap_ADC1_ETRGINJ : ADC1 External Trigger Injected Conversion remapping
* @arg GPIO_Remap_ADC1_ETRGREG : ADC1 External Trigger Regular Conversion remapping
* @arg GPIO_Remap_ADC2_ETRGINJ : ADC2 External Trigger Injected Conversion remapping
* @arg GPIO_Remap_ADC2_ETRGREG : ADC2 External Trigger Regular Conversion remapping
* @arg GPIO_Remap_ETH : Ethernet remapping (only for Connectivity line devices)
* @arg GPIO_Remap_CAN2 : CAN2 remapping (only for Connectivity line devices)
* @arg GPIO_Remap_SWJ_NoJTRST : Full SWJ Enabled (JTAG-DP + SW-DP) but without JTRST
* @arg GPIO_Remap_SWJ_JTAGDisable : JTAG-DP Disabled and SW-DP Enabled
* @arg GPIO_Remap_SWJ_Disable : Full SWJ Disabled (JTAG-DP + SW-DP)
* @arg GPIO_Remap_SPI3 : SPI3/I2S3 Alternate Function mapping (only for Connectivity line devices)
* When the SPI3/I2S3 is remapped using this function, the SWJ is configured
* to Full SWJ Enabled (JTAG-DP + SW-DP) but without JTRST.
* @arg GPIO_Remap_TIM2ITR1_PTP_SOF : Ethernet PTP output or USB OTG SOF (Start of Frame) connected
* to TIM2 Internal Trigger 1 for calibration (only for Connectivity line devices)
* If the GPIO_Remap_TIM2ITR1_PTP_SOF is enabled the TIM2 ITR1 is connected to
* Ethernet PTP output. When Reset TIM2 ITR1 is connected to USB OTG SOF output.
* @arg GPIO_Remap_PTP_PPS : Ethernet MAC PPS_PTS output on PB05 (only for Connectivity line devices)
* @arg GPIO_Remap_TIM15 : TIM15 Alternate Function mapping (only for Value line devices)
* @arg GPIO_Remap_TIM16 : TIM16 Alternate Function mapping (only for Value line devices)
* @arg GPIO_Remap_TIM17 : TIM17 Alternate Function mapping (only for Value line devices)
* @arg GPIO_Remap_CEC : CEC Alternate Function mapping (only for Value line devices)
* @arg GPIO_Remap_TIM1_DMA : TIM1 DMA requests mapping (only for Value line devices)
* @arg GPIO_Remap_TIM9 : TIM9 Alternate Function mapping (only for XL-density devices)
* @arg GPIO_Remap_TIM10 : TIM10 Alternate Function mapping (only for XL-density devices)
* @arg GPIO_Remap_TIM11 : TIM11 Alternate Function mapping (only for XL-density devices)
* @arg GPIO_Remap_TIM13 : TIM13 Alternate Function mapping (only for High density Value line and XL-density devices)
* @arg GPIO_Remap_TIM14 : TIM14 Alternate Function mapping (only for High density Value line and XL-density devices)
* @arg GPIO_Remap_FSMC_NADV : FSMC_NADV Alternate Function mapping (only for High density Value line and XL-density devices)
* @arg GPIO_Remap_TIM67_DAC_DMA : TIM6/TIM7 and DAC DMA requests remapping (only for High density Value line devices)
* @arg GPIO_Remap_TIM12 : TIM12 Alternate Function mapping (only for High density Value line devices)
* @arg GPIO_Remap_MISC : Miscellaneous Remap (DMA2 Channel5 Position and DAC Trigger remapping,
* only for High density Value line devices)
* @param NewState: new state of the port pin remapping.
* This parameter can be: ENABLE or DISABLE.
* @retval None
*/
void GPIO_PinRemapConfig(uint32_t GPIO_Remap, FunctionalState NewState)
参数1、配置映射方式,将PA0映射到PA15,选择部分重映射方式1和完全重映射
就是 GPIO_PartialRemap1_TIM2 或者 GPIO_FullRemap_TIM2
参数2、ENABLE or DISABLE
GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2, ENABLE);
但是需要注意的是PA15默认用来作为调试端口,故还需要关闭调试端口的复用
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);
然后将IO由0改为15
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;
关于同一个定时器的不同通道
同一个定时器不同的通道输出的PWM,频率相同,行为一致,但是占用比可以不同,因为CCR可以独立设定
对于控制舵机
建议设置PSC=72,AAR=20k
CCR设置为500~2500
对于上面的参数
PWM_SetCompare2(Angle / 180 * 2000 + 500);
上面的代码Angle为度0~180
因为期望为0180 ,而CCR的值范围 5002500
对Angle/180得到单位大小,然后*2000得到对应的1度的CCR间隔,再加上500的初始值
即为 Angle / 180 * 2000 + 500
总结
第一步,配置RCC定时器的时钟
第二步,配置时基单元为内部时钟(可以忽略)
第三步,配置时基单元,这一步最为重要
以上三步与STM32 TIM定时器使用内部时钟部分无差别
第四步,配置OC,主要设置PWM模式以及设置CCR寄存器的值,用于设置占空比
第五步,设置GPIO输出PWM,注意设置 GPIO为GPIO_Mode_AF_PP,即复用推挽